Model | omnis5u3mt9v022m | omnis5u3mt9v022c |
|---|---|---|
| Resolution | 3.6 MP (10x 752x480) | 3.6 MP (10x 752x480) |
| Max Frame Rate | 60 FPS | 60 FPS |
| Horizontal FOV | 360° | 360° |
| Vertical FOV | 58° | 58° |
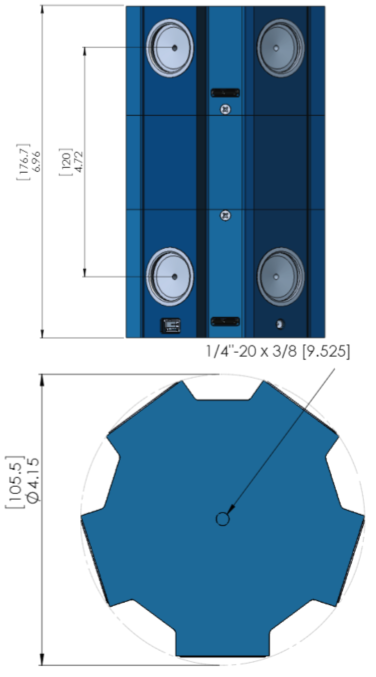
| Baseline | 4.72" (12cm) | 4.72" (12cm) |
| Interface | USB3 | USB3 |
| Max Cable Length | 15 feet (included) | 15 feet (included) |
| Color | No | Yes |
| Sensor | 10x Aptina MT9V022 | 10x Aptina MT9V022 |
| Trigger Output | Yes | Yes |
| Manual Exposure Control | Yes | Yes |
| Automatic Exposure Control | Yes | Yes |
| Manual Gain Control | Yes | Yes |
| Automatic Gain Control | Yes | Yes |
| Blending | CPU and GPU implementations (OpenGL) | |
| Stitching | Precalibrated; presets selectable during operation | |
| Lens | 10x 2.8mm F2.0 | 10x 2.8mm F2.0 |
| DC Input (optional) | 5 VDC input | 5 VDC input |
| Power Consumption | 800mA | 800mA |
| GPIO | 1 input, 1 output, ground | |
| OS Support | Windows, Linux | |
| Width | 4.1" (104 mm) | 4.1" (104 mm) |
| Height | 6.96" (177 mm) | 6.96" (177 mm) |
| Weight | 39.8 oz (1128 g) | 39.8 oz (1128 g) |